
Bewegingsanalyse in 3D kan tegenwoordig snel en gebruiksvriendelijk gebeuren op de werkvloer in reëele werkomstandigheden. Nieuwe technologieën zoals Xsens bieden zo ook een waaier aan mogelijkheden op vlak van ergonomie. Enerzijds kan men de ruwe data van een bewegingsanalyse interpreteren en visualiser. Anderzijds kunnen ze ook als input dienen voor biomechanische modellen en kan men een risicoanalyse automatiseren. Andere toepassing is dat de werking van cobots automatisch kan aangepast worden aan de werkhouding. Tot slot kan bewegingsanalyse ook in de ontwerpfase ingezet worden, bijvoorbeeld bij de productieplanning.
Interpreteren ruwe data
Roeland Motmans deelde aan de hand van een case studie zijn ervaringen met een 3D houdingsanalyse . Het voorbereiden, calibreren en meten gaat heel vlot en levert een massa aan data op. Het manueel omzetten en verwerken van de data vraagt echter heel wat werk. Twee situaties vergelijken kan relatief eenvoudig en snel gebeuren. Om uitspraak te doen of een werksituatie aanvaardbaar is of niet, kunnen internationale normen dienen. Voor deze interpretatie is echter meer werk nodig. Daarvoor zou software welkom zijn die dat automatisch doet.
Visualiseren data met Scalefit software
Frank Emrich van Scalefit presenteerde software om de 3D bewegingsanalyse in real time te visualiseren en interpreteren. De software toont een kleurencode per gewricht en registreert ook het aantal keren dat een bepaalde grenswaarde (EN1005-4 of ISO11226) wordt overschreden en hoe lang deze grens overschreden wordt. Grote voordeel is dat er geen tijd verloren gaat aan het manueel verwerken van data. De software geeft meteen verschillende relevante parameters om conclusies te trekken. Bijkomend kan men ook het krachtmoment in de schouder en rug aflezen of hoeveel men boven of onder schouderhoogte werkt. Het realtime visualiseren van de data maakt ze enerzijds aantrekkelijk, maar maakt ze ook bruikbaar voor training. De medewerker ziet direct het effect van de houdingen die hij/zij aanneemt en kan deze bijsturen.
Biomechanisch modelleren
Sebastian Skals doet onderzoek hoe men de biomechanische belasting op de lage rug kan berekenen uitgaande van een 3D bewegingsanalyse. De grenswaarden kan men halen uit de NIOSH methode of de Snook tabellen. Probleem bij statische modellen is dat ze de reële belasting vaak onderschatten omdat de realiteit dynamisch is. Zijn doctoraat bestudeert de fysieke belasting in Deense supermarkten. Medewerkers voerden daarbij 12 typische taken uit, bijvoorbeeld het inzetten van een doos bananen. De verwerking gebeurt in Anybody. Dat is een biomechanisch model dat lage drukkrachten, grondreactiekrachten, moment in de schouders en knieën, enz… voorspelt op basis van de bewegende avatar. Op die manier kan men uitspraak doen over de totale fysieke belasting van een taak.
Samenwerking cobots optimaliseren
Arash Ajoudani (IIT) toonde hoe bewegingsanalyse een meerwaarde kan bieden bij het werken met cobots. Door het in real time registreren van de werkhouding, kan dit input geven aan de cobot om zich aan te passen zodat de operator in een betere houding kan werken. Een cobot biedt bijvoorbeeld een werkstuk aan waarop de operator dient te schroeven. Wanneer de cobot het stuk te hoog houdt, zal de medewerker steeds met geheven armen moeten werken. Als tegelijk een 3D houdingsregistratie gebeurt, kan deze info input geven aan de cobot om zijn werkhoogte aan te passen en het stuk lager aan te bieden. Ook in de preventie van contactongevallen kan de houdingsanalyse mee functioneren als tool om de medewerker te identificeren. De operator wordt tastbaarder voor de cobot die zijn gedrag kan aanpassen. Dit kan zowel ergonomie als veiligheid ten goede komen.
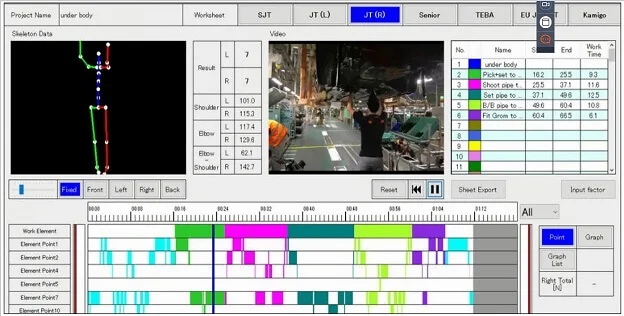
Automatiseren risicoanalyse
Stuart Bassford van Toyota stelde zijn “ergonomic thinking way” voor. Dat komt neer op een uniforme MSD strategie om gezonde medewerkers te hebben. Een belangrijk onderdeel daarin is de risicoanalyse. Daarvoor gebruiken ze een Toyota methode “Joshi Ten en Shisei Juryo Ten”, specifiek gericht op de bovenste ledematen. Deze methodes beschrijven specifieke houdingen, die voor elke werkpost dienen geïnventariseerd te worden. Daarvoor is echter veel vaardigheid nodig (25 blz aan uitleg), de verwerking duurt te lang (één uur per werkpost) en het blijft enigszins subjectief afhankelijk van de beoordelaar. Als oplossing hebben ze de bewegingsregistratie gekoppeld aan hun tool. Daarbij hebben ze software gemaakt die een visueel overzicht geeft en de specifieke houdingen automatisch invult. Er is veel minder opleiding nodig en de data zijn objectief. Doordat alles sneller verloopt, blijft er meer tijd over voor het bedenken van preventiemaatregelen.
Virtuele productieplanning obv bewegingsanalyse
Lars Fritsche ging nog een stapje verder. Bij IMK Automotive ontwikkelden ze software die zowel een risicoanalyse ergonomie, productiviteit, workflow optimalisatie en tijdsanalyses in één pakket verzamelt. De data van de houdingsanalyse worden geïmplementeerd in de EAWS methode, die gangbaar is in de auto-industrie. Op basis van de geregistreerde bewegingen kan de software verder de nodige takttijd en hersteltijd volgens MTM bepalen. De workflow zijn spaghetti charts die de wandelflow van de operator visualiseert. Deze veelzijdige ema Work Designer tool voor virtuele productieplanning toont aan dat de mogelijkheden van 3D bewegingsanalyse nog volop ontdekt worden…

* Houdingsanalyse:
Bewegingsanalyse – biomechanisch model – Scalefit – 3D houdingsanalyse